“”WebSockets””
Lately I have been exploring ways of plotting
data from a MCU to a web browser, at first I was using arduino and firmata which
basically allows you to get nice graphics but implementing it to be connected to
a webserver was kind of difficult.
Then we have the option of using Ethernet shields
but it lacks of enough memory to write good looking web pages, this can be
fixed by using short php commands and the process the rest on a webserver
however this solutions only applies to projects that do not need speed and real
time connections between server and client/web browser.
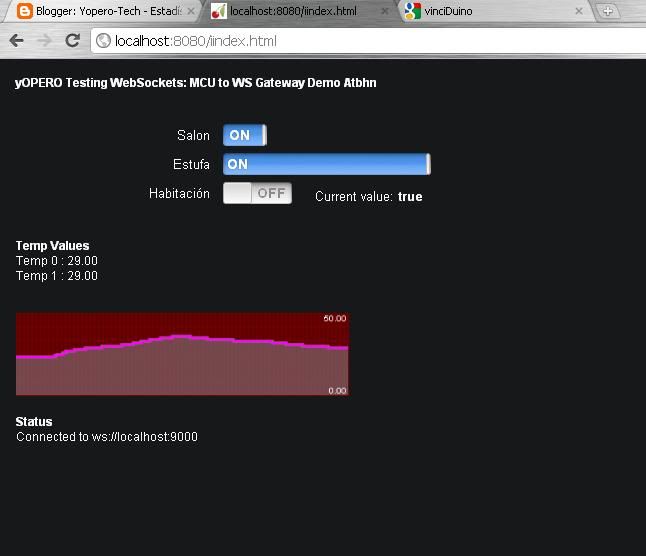
An example of that is controlling lights,
in this case we only need that the light switches on we do not really care
about speed, but imagine if you want to control via web an AUV(Autonomous
Underwater vehicle) the scenario changes dramatically because what is needed is
accuracy and real time communication between web browser and server which is
connected to our MCU via RS232,XBEE,Wireless,Ethernet, etc.(I know this
scenario is not very common but hey… this paper and websockets technology is
experimental so the scenarios too).
I have also explored Python and Pyserial and I
must say that python is so powerful as you can get lots of things with few lines
(although you need first to learn it J)
After exploring Python and some packages
such as wxPython, PyQt4, PyGtk you can build nice apps to be run on your
computer but it was not good enough for me I really like the look of a webpage
so I kept searching until I read something about a real fast technology tested
on financial applications, that’s the way I heard about WebSockets and then I thought
I may use it with my Arduino.
After looking on internet I found that some
people has already used web sockets to communicate with a MCU; people from http://mbed.org/cookbook/IOT uses Tornado a python server but unfortunately it does not run on windows due to a
Unix dependency.
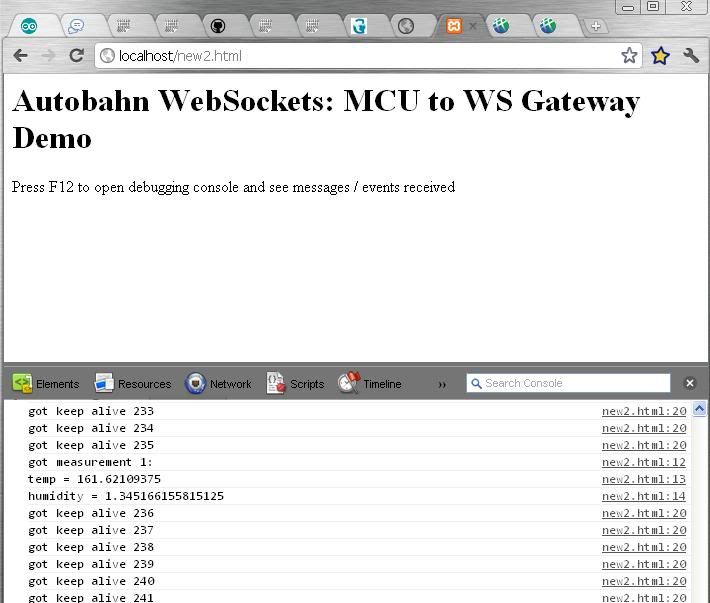
As I had my computer already setup with
python I went looking for a stand alone websocket package, it took me awhile to
find a nice piece of code in http://www.tavendo.de/autobahn/
Autobahn provides client and server implementations of WebSockets for Python and Android.
After contacting with Tobias O. the owner of this repository
I presented him what I want to achieve and he helped me a lot.
Now some theory about WebSockets:
What are WebSockets?
“”WebSockets is a technique for two-way
communication over one (TCP) socket, a type of PUSH technology. At the moment,
it’s still being standardized by the W3C; however, the latest versions of
Chrome and Safari have support for WebSockets.””
What do WebSockets
Replace?
Although the real purpose of WebSockets.
was not primarily designed to replace any of the things that are already in
place and working well. For example, it was not designed to be a low-overhead
version of AJAX.
The purpose is to provide a bidirectional, low latency, full duplex, communication
channel between the browser and server. It's real purpose is to enable a new
domain of web applications or to improve current ones that are abusing HTTP to
achieve bidirectional communication.
But…..Websockets can replace long-polling.
This is an interesting concept; the client sends a request to the server – now,
rather than the server responding with data it may not have, it essentially
keeps the connection open until the fresh, up-to-date data is ready to be sent
– the client next receives this, and sends another request. This has its
benefits: decreased latency being one of them, as a connection which has already
been opened does not require a new connection to be established. However,
long-polling isn’t really a piece of fancy technology: it’s also possible for a
request to time-out, and thus a new connection will be needed anyway.
Many Ajax
applications make use of the above – this can often be attributed to poor
resource utilization.
Wouldn’t it be great if the server could
wake up one morning and send its data to clients who are willing to listen
without some sort of pre established connection? Welcome to the world of PUSH
technology!
Next post I will describe the technical
part of this project.